
Författare: Rolf Danielsson
S37 byggdes i 56 exemplar. Från början avsågs 36 fotospaning och 18 havsövervakning. I ett sent skede beslutades fördelningen 28 – 28 vilket var tur. Behovet var betydligt större av SH eftersom övk-uppgifterna krävde många fpl. F21 fick fler SF än SH mht uppgifterna.
CK37
Dataindikator och SI
- högfoto
- avståndsfoto
- lågfoto
- mörkerfoto
Uppdragsprofil Radar med automatisk plott mha DKA
CK37, modpaket 12
Något om PLA/UTB
Det finns många skrifter som beskriver sensorsystemen i S37 och jag kommer bara att nämna några egenskaper som inte är så kända.
Lågkamerasysten Ska 24C
Värmekamera VKA 702
Mörkerspaningssystem
Högkamerasystem Ska 31
Kamerakapsel Ska 24D
Tumregler för foto med S37 (Pilothandbok)
PS 371/A
Rka 40
Varnare App27
App 48
KA/KB, senare U22/KB
Fotoingenjören Torsten Johansson fick Kungl Vetenskapakademiens medalj plus ett antal tusen kronor (ungefär år 1970) för den tekniska lösningen som möjliggjorde ombyggnad av befintliga SKA24C. Ombyggnaden gjordes av Omera i frankrike. I samband med detta ökades brännvidden från 100 mm till 120 mm. Samtidigt infördes en förbättrad exponeringsautomatik med fyra fotoceller i varje kamera.
(Åke Jakobsson redogör för den tekniska lösningen)
AJ och S37 med modpaket 12 innebärande kraftigt utökad datorisering med bl a data till alla balkar. Detta möjliggjorde kraftigt utökade lastmöjligheter så att alla AJ, SH och SF kunde bära alla vapen, såväl jakt som attack. Spaning dock enbart med S37 även efter mod. I samband med detta infördes ett bärbart dataminne (datastav) där ff mha FASA/PLA planlade hela flygpasset inne på divisionen. Sedan tog han med sig staven ut till fpl och stoppade in planeringen direkt i CK37. Dessutom registrerades flygningen i datastaven för utvärdering efter företag inklusive störning och motmedelsaktiviteter.
Fpl 37 Viggen var det första fpl i FV med ”dator. Detta innebar hjälp till ff med navigering, bränsleberäkning, taktikkommando mm. Navigeringen fick bestå av 7 brytpunkter och målet skulle alltid vara på nr 5 (M 5). Beräkningarna byggde på ABR (Automatisk BestickRäkning) där farten kom från dopplerradar längd och sida, kurs som blev inställd under starten mha känd banriktning. Beräkning skedde 10 ggr per sekund. Felet som givetvis uppstod var ca 1 % av flugen distans. Systemet kunde 0-ställas över förprogrammerande punkter (B-punkter). CK styrde även SI (SiktlinjeIndikatorn eller head-up displayen) och navigering kunde ske utan att titta ner på något instrument. SI användes även för att följa inflygningslinjen för landning vilket medgav låga minima (60m).

De inre kapslarna är mörkerspaningskapsel under vänster sidobalk och extra blixtljus under höger sidobalk. På den högra sidobalken sitter den vanligen fasta avståndskamerakapseln med SKa 24D medan en Rb 24 Sidewinder hänger på vänstra sidobalken. På centralbalken hänger extratanken. Kamerorna på marken framför flygplanet är f.v. SKa 24D (avståndskamera från kapseln ovanför), datakamera för registrering av fartygsmål och tre SKa 34 (från mörkerspaningskapseln intill). Foto Rune Rydh, F 13.

SH 37 med kamera- och yttre utrustning. Under vingspetsarna ligger de båda motmedelskapslarna. De inre kapslarna är mörkerspaningskapsel under vänster sidobalk och extra blixtljus under höger sidobalk. På den högra sidobalken sitter den vanligen fasta avståndskamerakapseln med SKa 24D medan en Rb 24 Sidewinder hänger på vänstra sidobalken. På centralbalken hänger extratanken. Kamerorna på marken framför flygplanet är fr v SKa 24D (avståndskamera från kapseln ovanför), datakamera för registrering av fartygsmål och tre SKa 34 (från mörkerspaningskapseln intill). Foto Rune Rydh, F 13.

Förarplatsen i SF 37 med det stora kamerasiktet rakt framför föraren, på samma ställe som övriga Viggen-versioner (utom SK 37 som liksom SF 37 saknade radar) har sin radarskärm. Siktets yttre öppning är belägen på högra undersidan av nospartiet. Siktets lodpunkt ligger i bakre (nedre) delen av siktet så att föraren skulle kunna se målet ett (mycket kort!) ögonblick före fotograferingen. Foto Flygvapnet.

Mörkerspaningskapseln med framförd noskon för service av kameror.

SF 37 Kamerainstallation.

Viggen i den sista varianten som AJS, målad i grå "JAS-färg".


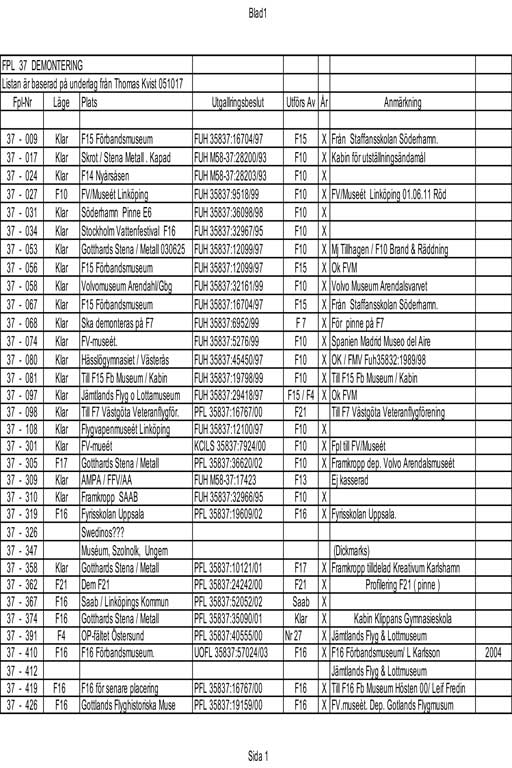
Författare: Thomas Kvist.
Författare: .

Författare: .

Författare: Per-Olof Ericsson.
Författare: Lööw, Ericsson.

Författare: Lööw, Ericsson, Hagertz.

Författare: Stefan Löfgren.
Författare: Urban Sörme.
Författare: .

Författare: Möller, Ljungstedt.
Författare: .
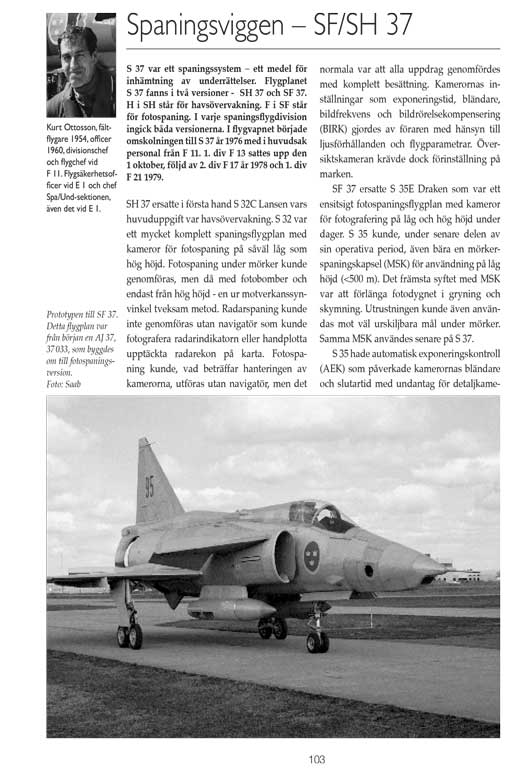
Författare: Kurt Ottosson.
Författare: Kurt Ottosson.
Författare: Sven Stridsberg.

